Закон сохранения импульса
Импульс системы тел
Начнём с простой ситуации системы двух тел. А именно, пусть имеются тело 1 и тело 2 с импульсами  и
и  соответственно. Импульс
соответственно. Импульс  системы данных тел — это векторная сумма импульсов каждого тела:
системы данных тел — это векторная сумма импульсов каждого тела:
![\[\vec{p} = \vec{p_1} + \vec{p_2}.\]](https://repetitor.org.ua/tpl/ql-cache/quicklatex.com-f901854abe559c451a780df3cd6218a1_l3.png "Rendered by QuickLaTeX.com")
Оказывается, для импульса системы тел имеется формула, аналогичная второму закону Ньютона в виде  Давайте выведем эту формулу.
Давайте выведем эту формулу.
Все остальные объекты, с которыми взаимодействуют рассматриваемые нами тела 1 и 2, мы будем называть внешними телами. Силы, с которыми внешние тела действуют на тела 1 и 2, называем внешними силами. Пусть  — результирующая внешняя сила, действующая на тело 1. Аналогично
— результирующая внешняя сила, действующая на тело 1. Аналогично  — результирующая внешняя сила, действующая на тело 2 (рис. 1).
— результирующая внешняя сила, действующая на тело 2 (рис. 1).
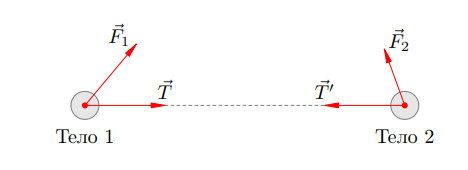
 . Тогда тело 1 действует на тело 2 с силой
. Тогда тело 1 действует на тело 2 с силой  . По третьему закону Ньютона силы и равны по модулю и противоположны по направлению:
. По третьему закону Ньютона силы и равны по модулю и противоположны по направлению:  . Силы и —
. Силы и —это внутренние силы, действующие в системе.
Запишем для каждого тела 1 и 2 второй закон Ньютона в форме :
(1) 
(2) 
![\[\frac{d\vec{p}_1}{d t} + \frac{d\vec{p}_2}{d t} = \vec{F}_1 + \vec{F}_2 + \vec{T} + \vec{T}_0 .\]](https://repetitor.org.ua/tpl/ql-cache/quicklatex.com-6434fbb8a2fa56b1420ff7f577caea34_l3.png "Rendered by QuickLaTeX.com")
В левой части полученного равенства стоит сумма производных, равная производной суммы векторов  и
и  . В правой части имеем
. В правой части имеем  в силу третьего закона Ньютона:
в силу третьего закона Ньютона:
![\[\frac{d(\vec{p}_1 + \vec{p}_2)}{d t} = \vec{F}_1 + \vec{F}_2 .\]](https://repetitor.org.ua/tpl/ql-cache/quicklatex.com-cc6f8478c4fb6a312f31f3c3d1f7fc75_l3.png "Rendered by QuickLaTeX.com")
Но  — это импульс системы тел 1 и 2. Обозначим также
— это импульс системы тел 1 и 2. Обозначим также  — это результирующая внешних сил, действующих на систему. Получаем:
— это результирующая внешних сил, действующих на систему. Получаем:
(3) 
Таким образом, скорость изменения импульса системы тел есть равнодействующая внешних сил, приложенных к системе. Равенство (3), играющее роль второго закона Ньютона для системы тел, мы и хотели получить.
Формула (3) была выведена для случая двух тел. Теперь обобщим наши рассуждения на случай произвольного количества тел в системе.

Импульсом системы тел называется векторная сумма импульсов всех тел, входящих в систему. Если система состоит из  тел, то импульс этой системы равен:
тел, то импульс этой системы равен:
![\[\vec{p} = \vec{p}_1 + \vec{p}_2 + ..... + \vec{p}_N .\]](https://repetitor.org.ua/tpl/ql-cache/quicklatex.com-6ed293f769c9eb4c10ae5cc0273a5714_l3.png "Rendered by QuickLaTeX.com")
Дальше всё делается совершенно так же, как и выше (только технически это выглядит несколько сложнее). Если для каждого тела записать равенства, аналогичные (1) и (2), а затем все эти равенства сложить, то в левой части мы снова получим производную импульса системы, а в правой части останется лишь сумма внешних сил (внутренние силы, попарно складываясь, дадут нуль ввиду третьего закона Ньютона). Поэтому равенство (3) останется справедливым и в общем случае.
Закон сохранения импульса
Система тел называется замкнутой, если действия внешних тел на тела данной системы или пренебрежимо малы, или компенсируют друг друга. Таким образом, в случае замкнутой системы тел существенно лишь взаимодействие этих тел друг с другом, но не с какими-либо другими телами.
Равнодействующая внешних сил, приложенных к замкнутой системе, равна нулю:  . В этом случае из (3) получаем:
. В этом случае из (3) получаем:
![\[\frac{d \vec{p}}{dt} = \vec{0}.\]](https://repetitor.org.ua/tpl/ql-cache/quicklatex.com-b9e2a70a8d167c855e16dabd1a67b67a_l3.png "Rendered by QuickLaTeX.com")
Но если производная вектора обращается в нуль (скорость изменения вектора равна нулю), то сам вектор не меняется со временем:
![\[\vec{p} = const .\]](https://repetitor.org.ua/tpl/ql-cache/quicklatex.com-a463e32a7388ef24361caf87bb087bc6_l3.png "Rendered by QuickLaTeX.com")
Закон сохранения импульса. Импульс замкнутой системы тел остаётся постоянным с течением времени при любых взаимодействиях тел внутри данной системы.
Простейшие задачи на закон сохранения импульса решаются по стандартной схеме, которую мы сейчас покажем.
Задача. Тело массы  г движется со скоростью
г движется со скоростью  м/с по гладкой горизонтальной поверхности. Навстречу ему движется тело массы
м/с по гладкой горизонтальной поверхности. Навстречу ему движется тело массы  г со скоростью
г со скоростью  м/с. Происходит абсолютно неупругий удар (тела слипаются). Найти скорость тел после удара.
м/с. Происходит абсолютно неупругий удар (тела слипаются). Найти скорость тел после удара.
Решение. Ситуация изображена на рисунке 2. Ось X направим в сторону движения первого тела.
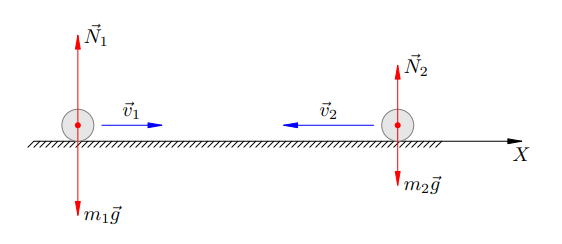
![\[m_1\vec{g} + \vec{N}_1 = \vec{0}, m_2 \vec{g} + \vec{N}_2 = \vec{0}.\]](https://repetitor.org.ua/tpl/ql-cache/quicklatex.com-dc0c43883fea747b2a3244504b71d3d5_l3.png "Rendered by QuickLaTeX.com")
Таким образом, векторная сумма сил, приложенных к системе данных тел, равна нулю. Это значит, что система тел замкнута. Стало быть, для неё выполняется закон сохранения импульса (обозначим импульс до удара как  и после удара как
и после удара как  ):
):
![\[\vec{p}_s = \vec{p}_f\]](https://repetitor.org.ua/tpl/ql-cache/quicklatex.com-875d33646dd6e891f05c8c2e6e29d48c_l3.png "Rendered by QuickLaTeX.com")
Импульс системы до удара — это сумма импульсов тел:
![\[\vec{p}_s = m_1 \vec{v}_1 + m_2 \vec{v}_2.\]](https://repetitor.org.ua/tpl/ql-cache/quicklatex.com-a90cc0c738cee590c25c20cf3e5df1bc_l3.png "Rendered by QuickLaTeX.com")
После неупругого удара получилось одно тело массы  которое движется с искомой скоростью
которое движется с искомой скоростью  :
:
![\[\vec{p}_f = (m_1 + m_2 )\vec{v}.\]](https://repetitor.org.ua/tpl/ql-cache/quicklatex.com-3be1f92ebcee23738aba78d25e0002c3_l3.png "Rendered by QuickLaTeX.com")
Из закона сохранения импульса  имеем:
имеем:
![\[m_1 \vec{v}_1 + m_2 \vec{v}_2 = (m_1 + m_2 )\vec{v}\]](https://repetitor.org.ua/tpl/ql-cache/quicklatex.com-3137067614778670b5413bbd076aa53d_l3.png "Rendered by QuickLaTeX.com")
Отсюда находим скорость тела, образовавшегося после удара:
![\[\vec{v} = \frac{m_1 \vec{v}_1 + m_2 \vec{v}_2}{m_1 + m_2} .\]](https://repetitor.org.ua/tpl/ql-cache/quicklatex.com-570150cdeec888476170bc25d7d2f0e0_l3.png "Rendered by QuickLaTeX.com")
Переходим к проекциям на ось X:
![\[v_x = \frac{ m_1 v_{1x} + m_2 v_{2x}}{ m_1 + m_2} .\]](https://repetitor.org.ua/tpl/ql-cache/quicklatex.com-18d09c08b25ff0e5cfac1d136c33f219_l3.png "Rendered by QuickLaTeX.com")
По условию имеем:  3 м/с,
3 м/с,  −13 м/с, так что
−13 м/с, так что
![\[v_x = \frac{0,8* 3 - 0,2 *13}{0,8 + 0,2} = -0,2 .\]](https://repetitor.org.ua/tpl/ql-cache/quicklatex.com-b684893d691cc998b85d59ef94cc253f_l3.png "Rendered by QuickLaTeX.com")
Знак минус указывает на то, что слипшиеся тела двигаются в сторону, противоположную оси X. Искомая скорость:  м/с.
м/с.