Работа. Мощность
Работа
Пусть на тело действует постоянная сила  и тело, двигаясь прямолинейно по горизонтальной поверхности, совершило перемещение
и тело, двигаясь прямолинейно по горизонтальной поверхности, совершило перемещение  . Сила не обязательно является непосредственной причиной перемещения (так, сила тяжести не является непосредственной причиной перемещения шкафа, который передвигают по комнате).
. Сила не обязательно является непосредственной причиной перемещения (так, сила тяжести не является непосредственной причиной перемещения шкафа, который передвигают по комнате).
Предположим сначала, что векторы силы и перемещения сонаправлены (рис. 1; остальные силы, действующие на тело, не указаны).
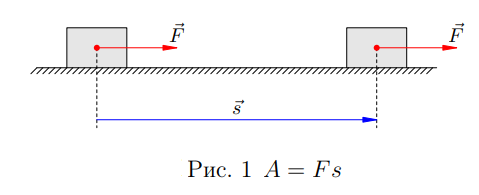
В этом простейшем случае работа  определяется как произведение модуля силы на модуль
определяется как произведение модуля силы на модуль
перемещения:
(1) 
Единицей измерения работы служит джоуль (Дж): Дж = Н · м. Таким образом, если под действием силы 1 Н тело перемещается на 1 м, то сила совершает работу 1 Дж.
Работа силы, перпендикулярной перемещению, по определению считается равной нулю. Так, в данном случае сила тяжести и сила реакции опоры не совершают работы.
Пусть теперь вектор силы образует с вектором перемещения острый угол  (рис. 2).
(рис. 2).
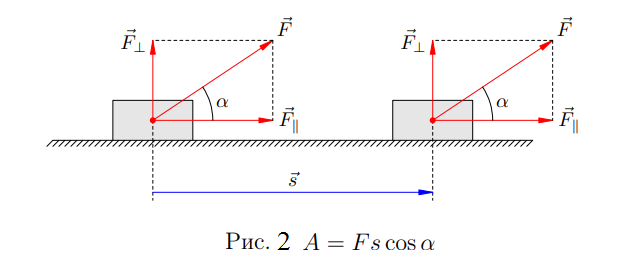
Разложим силу на две составляющие:  (параллельную перемещению) и
(параллельную перемещению) и  (перпендикулярную перемещению). Работу совершает только . Поэтому для работы силы получаем:
(перпендикулярную перемещению). Работу совершает только . Поэтому для работы силы получаем:
 Итак,
Итак,
(2) 
Если вектор силы образует с вектором перемещения тупой угол , то работа по-прежнему определяется формулой (2). В этом случае работа оказывается отрицательной.

Например, работа силы трения скольжения, действующей на тело в рассмотренных ситуациях, будет отрицательной, так как сила трения направлена противоположно перемещению. В этом случае имеем: = 180◦,  , и для работы силы трения получаем:
, и для работы силы трения получаем:
![\[A_{tr} = -F_{tr} s = -\mu m g s,\]](https://repetitor.org.ua/tpl/ql-cache/quicklatex.com-ba755648ced37f284cf4e61a1e880d4a_l3.png "Rendered by QuickLaTeX.com")
где  — масса тела,
— масса тела,  — коэффициент трения между телом и опорой.
— коэффициент трения между телом и опорой.
Соотношение (2) означает, что работа является скалярным произведением векторов силы и перемещения:
![\[A = \vec{F} \vec{s}.\]](https://repetitor.org.ua/tpl/ql-cache/quicklatex.com-86d8d0c04f72179a7073c4c5f0bcff71_l3.png "Rendered by QuickLaTeX.com")
Это позволяет вычислять работу через координаты данных векторов:
![\[A = F_x s_x + F_y s_y + F_z s_z.\]](https://repetitor.org.ua/tpl/ql-cache/quicklatex.com-9c311a08193fe116efb383153e6d0896_l3.png "Rendered by QuickLaTeX.com")
Пусть на тело действуют несколько сил  и — равнодействующая этих сил. Для работы силы имеем:
и — равнодействующая этих сил. Для работы силы имеем:
![\[A = \vec{F} \vec{s} = (\vec{F}_1 + vec{F}_2+...+vec{F}_n) \vec{s} = \vec{F}_1 \vec{s} + vec{F}_2 \vec{s}+...+vec{F}_n \vec{s},\]](https://repetitor.org.ua/tpl/ql-cache/quicklatex.com-e25a43593cd1a690d9f8433d8799ae11_l3.png "Rendered by QuickLaTeX.com")
или
![\[A = A_1 + A_2 + . . . + A_n,\]](https://repetitor.org.ua/tpl/ql-cache/quicklatex.com-1d1f9e241c22cb4155ca5c35e2aa48ea_l3.png "Rendered by QuickLaTeX.com")
где  — работы сил
— работы сил 
Итак, работа равнодействующей приложенных к телу сил равна сумме работ каждой силы в отдельности.
Мощность
Часто имеет значение быстрота, с которой совершается работа. Скажем, на практике важно знать, какую работу сможет выполнить данное устройство за фиксированное время.
Мощность — это величина, характеризующая скорость совершения работы. Мощность 
есть отношение работы ко времени  , за которое эта работа совершена:
, за которое эта работа совершена:
![\[N = \frac{A}{t}.\]](https://repetitor.org.ua/tpl/ql-cache/quicklatex.com-ad2ea76165b08fdcc1addcf7039b3749_l3.png "Rendered by QuickLaTeX.com")
Мощность измеряется в ваттах (Вт). 1 Вт = 1 Дж/с, то есть 1 Вт — это такая мощность, при которой работа в 1 Дж совершается за 1 с.
Предположим, что силы, действующие на тело, уравновешены, и тело движется равномерно и прямолинейно со скоростью  . В этом случае существует полезная формула для мощности, развиваемой одной из действующих сил .
. В этом случае существует полезная формула для мощности, развиваемой одной из действующих сил .
За время тело совершит перемещение  Работа силы будет равна:
Работа силы будет равна:
![\[A = \vec{F} \vec{s} =\vec{F} \vec{v} t .\]](https://repetitor.org.ua/tpl/ql-cache/quicklatex.com-e4c40f74855fbf28330b136d64062416_l3.png "Rendered by QuickLaTeX.com")
Отсюда получаем мощность:
![\[N = \vec{F} \vec{v}\]](https://repetitor.org.ua/tpl/ql-cache/quicklatex.com-742d68b7041db6552da2808c44d0b98c_l3.png "Rendered by QuickLaTeX.com")
или
![\[N = F v cos \alpha,\]](https://repetitor.org.ua/tpl/ql-cache/quicklatex.com-8c5117561f6f6d3e12484f8b4330b464_l3.png "Rendered by QuickLaTeX.com")
где — угол между векторами силы и скорости.
Наиболее часто эта формула используется в ситуации, когда — «сила тяги» двигателя автомобиля (которая на самом деле есть сила трения ведущих колёс о дорогу). В этом случае  , и мы получаем просто:
, и мы получаем просто:
![\[N = F v.\]](https://repetitor.org.ua/tpl/ql-cache/quicklatex.com-26de9b22f81bbfe958bd2399e296e23a_l3.png "Rendered by QuickLaTeX.com")