Робота. Потужність.
Робота
Нехай на тіло діє постійна сила  і тіло, рухаючись прямолінійно по горизонтальній поверхні, зробило переміщення
і тіло, рухаючись прямолінійно по горизонтальній поверхні, зробило переміщення  . Сила не обов’язково є безпосередньою причиною переміщення (так, сила тяжіння не є безпосередньою причиною переміщення шафи, яку пересувають по кімнаті).
. Сила не обов’язково є безпосередньою причиною переміщення (так, сила тяжіння не є безпосередньою причиною переміщення шафи, яку пересувають по кімнаті).
Припустимо спочатку, що вектори сили і переміщення співнаправлені (рис. 1, решта сили, що діють на тіло, не вказані).
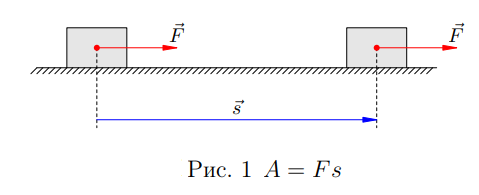
У цьому простому випадку робота  визначається як добуток модуля сили на модуль
визначається як добуток модуля сили на модуль
переміщення:
(1) 
Одиницею вимірювання роботи служить джоуль (Дж): Дж = Н · м. Таким чином, якщо під дією сили 1 Н тіло переміщається на 1 м, то сила здійснює роботу 1 Дж.

Робота сили, перпендикулярної переміщенню, за визначенням вважається рівною нулю. Так, в даному випадку сила тяжіння і сила реакції опори не здійснюють роботи.
Нехай тепер вектор сили утворює з вектором переміщення гострий кут  (рис. 2).
(рис. 2).
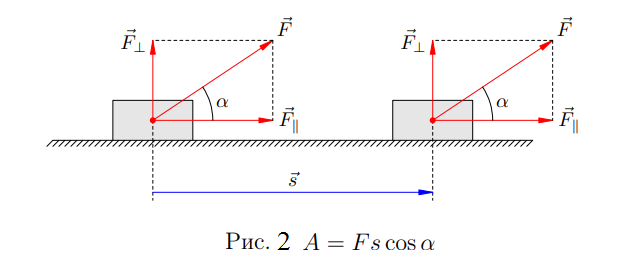
Розкладемо силу на дві складові:  (паралельну переміщенню) і
(паралельну переміщенню) і  (перпендикулярну переміщенню). Роботу здійснює тільки . Тому для роботи сили отримуємо:
(перпендикулярну переміщенню). Роботу здійснює тільки . Тому для роботи сили отримуємо:
 Отже,
Отже,
(2) 
Якщо вектор сили утворює з вектором переміщення тупий кут , то робота, як і раніше визначається формулою (2). У цьому випадку робота виявляється негативною.
Наприклад, робота сили тертя ковзання, що діє на тіло в розглянутих ситуаціях, буде негативною, так як сила тертя спрямована протилежно переміщенню. У цьому випадку маємо: = 180◦,  , і для роботи сили тертя отримуємо:
, і для роботи сили тертя отримуємо:
![\[A_{tr} = -F_{tr} s = -\mu m g s,\]](https://repetitor.org.ua/tpl/ql-cache/quicklatex.com-ba755648ced37f284cf4e61a1e880d4a_l3.png "Rendered by QuickLaTeX.com")
де  – маса тіла,
– маса тіла,  – коефіцієнт тертя між тілом і опорою.
– коефіцієнт тертя між тілом і опорою.
Співвідношення (2) означає, що робота є скалярним твором векторів сили і переміщення:
![\[A = \vec{F} \vec{s}.\]](https://repetitor.org.ua/tpl/ql-cache/quicklatex.com-86d8d0c04f72179a7073c4c5f0bcff71_l3.png "Rendered by QuickLaTeX.com")
Це дозволяє обчислювати роботу через координати даних векторів:
![\[A = F_x s_x + F_y s_y + F_z s_z.\]](https://repetitor.org.ua/tpl/ql-cache/quicklatex.com-9c311a08193fe116efb383153e6d0896_l3.png "Rendered by QuickLaTeX.com")
Нехай на тіло діють кілька сил  і – рівнодіюча цих сил. Для роботи сили маємо:
і – рівнодіюча цих сил. Для роботи сили маємо:
![\[A = \vec{F} \vec{s} = (\vec{F}_1 + vec{F}_2+...+vec{F}_n) \vec{s} = \vec{F}_1 \vec{s} + vec{F}_2 \vec{s}+...+vec{F}_n \vec{s},\]](https://repetitor.org.ua/tpl/ql-cache/quicklatex.com-e25a43593cd1a690d9f8433d8799ae11_l3.png "Rendered by QuickLaTeX.com")
або
![\[A = A_1 + A_2 + . . . + A_n,\]](https://repetitor.org.ua/tpl/ql-cache/quicklatex.com-1d1f9e241c22cb4155ca5c35e2aa48ea_l3.png "Rendered by QuickLaTeX.com")
де  – роботи сил
– роботи сил 
Отже, рівнодіюча робота прикладених до тіла сил дорівнює сумі робіт кожної сили окремо.
Потужність
Часто має значення швидкість, з якою відбувається робота. Скажімо, на практиці важливо знати, яку роботу зможе виконати даний пристрій за фіксований час.
Потужність – це величина, що характеризує швидкість здійснення роботи. Потужність 
є відношення роботи до часу  , за яке ця робота здійснена:
, за яке ця робота здійснена:
![\[N = \frac{A}{t}.\]](https://repetitor.org.ua/tpl/ql-cache/quicklatex.com-ad2ea76165b08fdcc1addcf7039b3749_l3.png "Rendered by QuickLaTeX.com")
Потужність вимірюється у Ватах (Вт). 1 Вт = 1 Дж/с, тобто 1 Вт – це така потужність, при якій робота в 1 Дж відбувається за 1 с.
Припустимо, що сили, що діють на тіло, врівноважені, і тіло рухається рівномірно і прямолінійно зі швидкістю  . У цьому випадку існує корисна формула для потужності, що розвивається однієї з діючих сил .
. У цьому випадку існує корисна формула для потужності, що розвивається однієї з діючих сил .
За час тіло зробить переміщення  Робота сили буде дорівнювати:
Робота сили буде дорівнювати:
![\[A = \vec{F} \vec{s} =\vec{F} \vec{v} t .\]](https://repetitor.org.ua/tpl/ql-cache/quicklatex.com-e4c40f74855fbf28330b136d64062416_l3.png "Rendered by QuickLaTeX.com")
Звідси отримуємо потужність:
![\[N = \vec{F} \vec{v}\]](https://repetitor.org.ua/tpl/ql-cache/quicklatex.com-742d68b7041db6552da2808c44d0b98c_l3.png "Rendered by QuickLaTeX.com")
або
![\[N = F v cos \alpha,\]](https://repetitor.org.ua/tpl/ql-cache/quicklatex.com-8c5117561f6f6d3e12484f8b4330b464_l3.png "Rendered by QuickLaTeX.com")
де – кут між векторами сили і швидкості.
Найбільш часто ця формула використовується в ситуації, коли – «сила тяги» двигуна автомобіля (яка насправді є сила тертя коліс об дорогу). В цьому випадку  , і ми отримуємо просто:
, і ми отримуємо просто:
![\[N = F v.\]](https://repetitor.org.ua/tpl/ql-cache/quicklatex.com-26de9b22f81bbfe958bd2399e296e23a_l3.png "Rendered by QuickLaTeX.com")